모션 트래킹 센서, 움직임을 추적한다
움직임과 방위, 고도 등을 감지하는 모션 센서의 시작은 1990년대 초반에 자동차에 MEMS 가속도 센서가 장착되면서부터 활발하게 시작되었습니다. 처음에는 에어백의 작동 순간을 결정하기 위한 충격 감지가 목적이었죠. 이후 2000년대에 들어서면서 닌텐도의 가정용 게임기인 위(Wii)에 적용되면서 인간의 움직임을 감지, 가상의 아바타가 모션을 모방하도록 하였고, 마침내 2007년 애플에서 최초의 스마트폰을 공개하면서 모바일 기기의 모션을 감지, 트래킹을 할 수 있는 수준으로 본격 등장을 알렸습니다. 즉, 직선 운동을 감지하기 위한 가속도 센서, 회전 운동 감지용 가속도 센서, 이들과 함께 진동이나 충격, 경사 등을 함께 감지할 수가 있었죠.


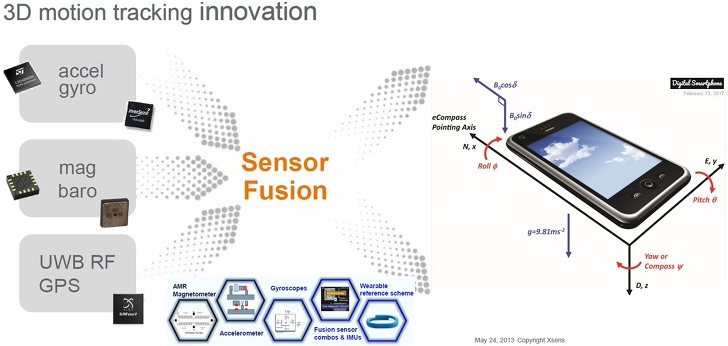
이후로 스마트폰 안에는 직선 및 회전 운동 측정용 가속도, 각속도 센서들과 함께 방위를 알기 위한 지구 자기장 측정 센서, 즉 나침반, 그리고 고도를 알 수 있는 기압 측정용 압력 센서가 연이어서 탑재가 되면서 4종, 10축 모션 트래킹 센서 모듈이 완성됩니다. 즉, 가속도와 각속도, 그리고 자기장 센서들은 각 세 개씩 총 9개, 여기에 한 개의 고도 센서가 더해진 거죠. 여기에 GPS(Global Positioning System, 범지구 위치 결정 시스템) 지원까지 더해져서 이들의 융합이 일어난다면 모바일 기기의 위치, 이동, 방위, 고도에 이르기까지 완벽한 모션 및 위치 추적이 가능해집니다.

이러한 모션 트래킹 센서 모듈은 스마트폰, 모바일 기기를 넘어서 웨어러블 기기를 통하여 아바타는 물론 가상 및 증강 현실의 구현, 개인의 운동과 건강 모니터링 기능까지 가능합니다. 이에 더하여 움직이는 장치들, 즉 안전 강화용 혹은 무인 자동차, 드론, 나아가서는 비행 택시까지 미래의 교통, 운송 수단에도 충분히 적용될 수 있어서 MEMS 기술의 총아로 입지를 굳혀가고 있죠.

직선 운동과 회전 운동, 그리고 방위와 고도는 함께, 동시에 측정되어 센서 퓨전을 통하여 신호가 제공되어야 하므로 4종 10축 센서들은 함께 패키징되거나 모듈화가 되어 생산, 사용됩니다. 물론 여기에는 상황과 용도에 따라 온습도 센서와 마이크로폰과 등이 더해지며, 전원과 무선 통신 기능도 추가되는 경우가 종종 있습니다.
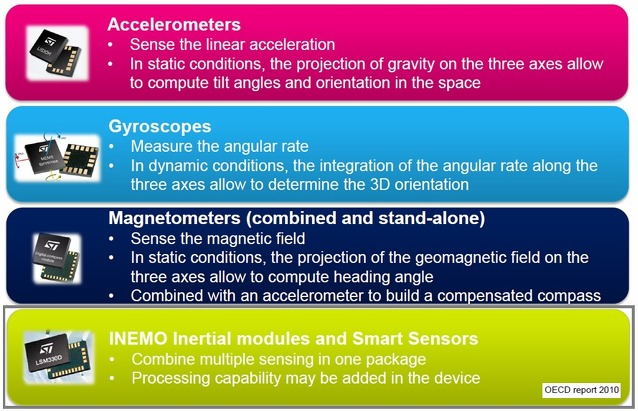

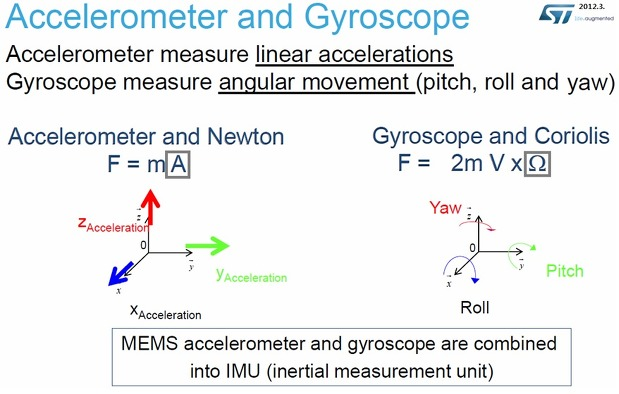
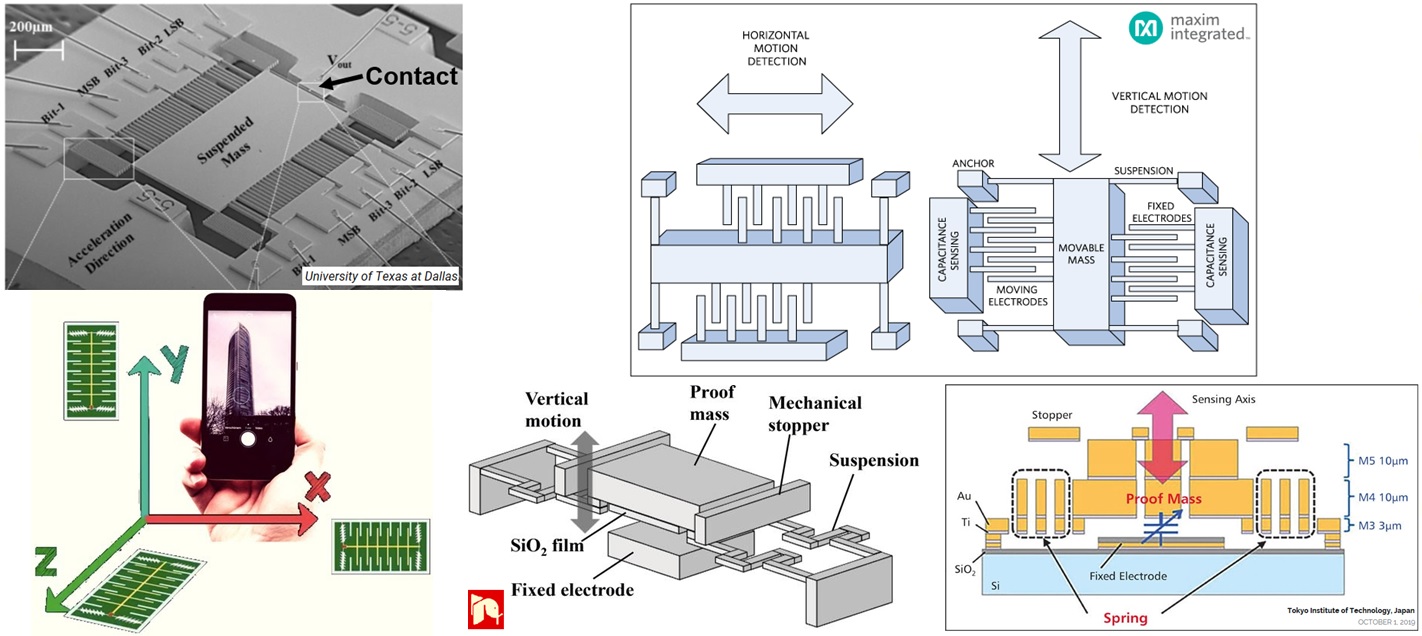
먼저 직선 운동은 가속도 센서로 감지를 하죠. 가속도를 시간에 대해 적분하면 속도, 한번 더 적분을 하면 이동 거리를 알 수 있습니다. 실리콘 MEMS 가속도계는 뉴턴의 제2법칙, 즉 가속도의 법칙을 따릅니다. 'F = ma'로 '물체의 운동량의 시간에 따른 변화율은 크기와 방향에 있어서 그 물체에 작용하는 힘과 같음'이죠. MEMS 가속도 센서에서는 가속도가 발생하면 운동량인 '질량(m)과 속도(v)의 곱'의 시간에 따른 변화율, 즉 '질량(m)과 가속도(a)의 곱'만큼 힘(F)이 발생하고, 이 힘으로 인하여 테스트 질량(test mass, proof mass), 혹은 평행판 커패시터에서 이동형 전극이 움직이고, 이러한 움직임(변위)의 정도를 정전 용량과 같은 전기적인 신호로 출력합니다. 이로부터 발생된 가속도의 값을 얻게 되죠.
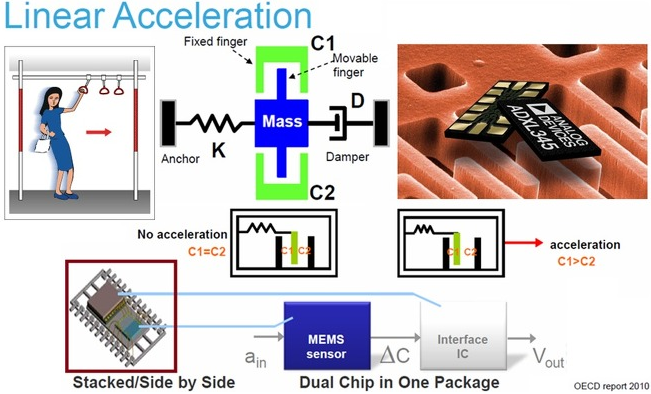
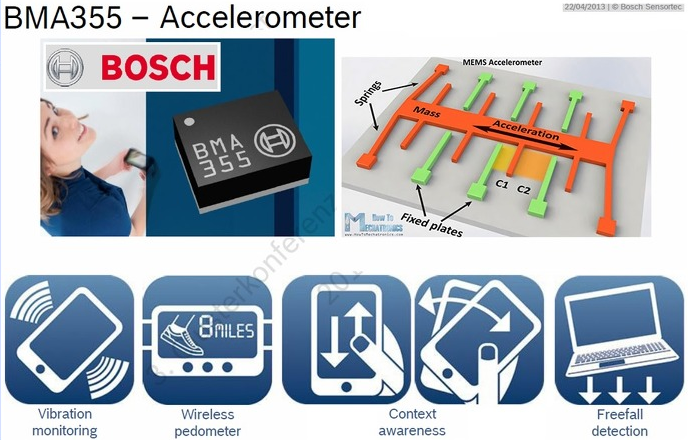
주로 용량형 센서로 속도 변화(가속도) 발생, 이로 인한 테스트 질량이나 이동형 전극의 움직임, 이는 이동형 전극과 고정형 전극 간의 정전 용량의 변화로 얻어지며, 이는 가속도 값으로 환산되는 과정을 거치게 되죠. 센서용 MEMS 구조물은 주로 빗살형 액추에이터(comb actuator)가 사용되며, 평행판 커패시터의 정전 용량(C)의 값은 유전율을 비례 상수로 하여 면적에 비례하고 두 전극 간의 거리에 반비례하므로, 따라서 가속도에 의해 두 전극 간의 간격이나 교차되는 면적이 변하게 됩니다. 이러한 현상은 양 끝단이 고정된 스프링 모델을 이용하여 수치적으로 설명이 가능하며, 가속도가 없을 경우에는 정전 용량의 변화가 제로(0)이며 가속도가 증가함에 따라 이동형 구조물의 움직임이 커져 두 전극 간 교차 면적이나 전극 간의 간격이 증가, 혹은 감소하면서 정전 용량의 변화가 발생, 증가하게 됩니다.


이러한 가속도 센서들은 총 세 개가 3축 방향, 즉 x-y-z 방향으로 설치되어 측정된 세 개 가속도의 벡터 합이 총 가속도의 크기와 방향을 알려주게 되며, 이로부터 속도와 이동 거리가 얻어집니다. 움직이는 MEMS 구조물은 주로 테스트 중량을 구비한 빗살형 전극들로 평행판 커패시터에서의 한 쪽 전극인 이동형 전극에 해당하며 고정형 상대 전극과 마주하고 있습니다. 동작 안정성을 위해 진공, 혹은 반응성이 적은 기체 분위기로 밀봉 패키징되어 있으며, 각각의 용도에 맞는 동작 범위 내에서 움직임이 발생하고, 그 이상의 움직임은 절제하도록 멈춤을 담당하는 부분이 함께 만들어지죠.
모바일 기기 안에는 세 개의 가속도 센서들이 서로 다른 3축 방향으로 운동할 수 있도록 설치되어 있으며, 이러한 가속도 센서의 용도는 직선 운동의 모니터링뿐만 아니라, 중력 감지, 진동 감지, 만보계(pedometer), 기기의 움직임에 대한 순간적인 상황 인식(context awareness), 그리고 낙하와 충격의 감지를 통한 기기의 전원 차단 등의 기능을 함께 수행합니다. 캠코더 촬영 중에 손 떨림 정도를 감지하여 영상 보정에 기여하기도 하죠.

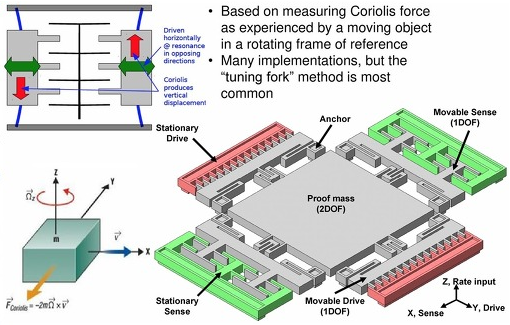
각속도를 측정하는 센서, 자이로스코프를 MEMS로 구현하기 위하여 다양한 원리와 방법들이 시도가 되어왔습니다. 이들 중에서 현재에는 코리올리 효과(Coriolis effect), 즉 회전하는 계에서 발생하는 관성력인 코리올리 힘(Coriolis force)을 이용하는 방식이 주로 사용되고 있죠. F = 2m(v x w), 속도 v로 직선 운동을 하는 질량 m인 물체에 각속도 w가 발생하면, 두 벡터를 곱한 방향으로 코리올리의 힘 F가 만들어집니다. 그 크기는 속도와 각속도, 그리고 질량의 두 배를 곱한 값으로 나타나죠. 따라서 코리올리 힘 F를 또 다른 가속도 센서로 측정을 하면, 측정하면 각속도 w를 F/2mv 식으로부터 얻을 수 있습니다.
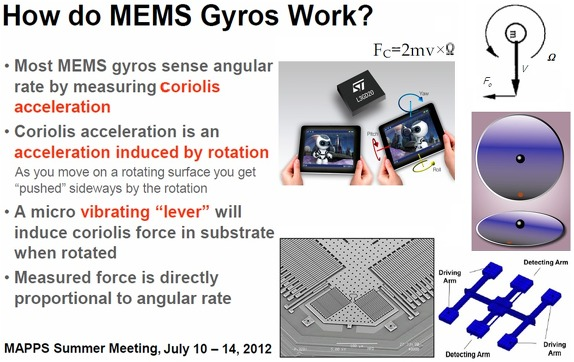

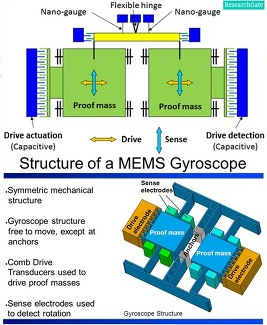
이와 같이 각속도 센서는 초기의 직선 운동 속도 v를 측정하기 위한 구동용(drive) 가속도 센서와 코리올리 힘 F를 측정하기 위한 감지용(sense) 가속도 센서 두 개가 서로 수직 방향으로 배치되어 만들어지죠. 이때 사용되는 가속도 센서는 직선 가속도 측정용과 같은 이동 전극과 고정 전극이 빗살 구조로 구성된 평행판 커패시터 모델의 정전용량형 센서이며, 힘이 발생하였을 때 변위를 크게 하기 위하여 테스트 질량에 연결되어 있습니다.
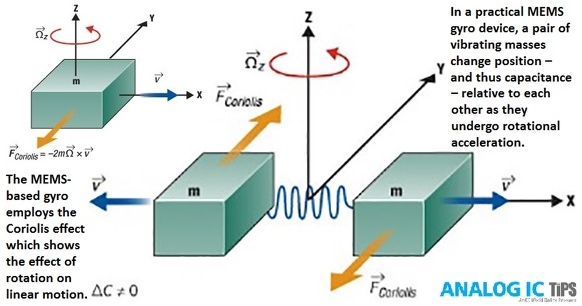
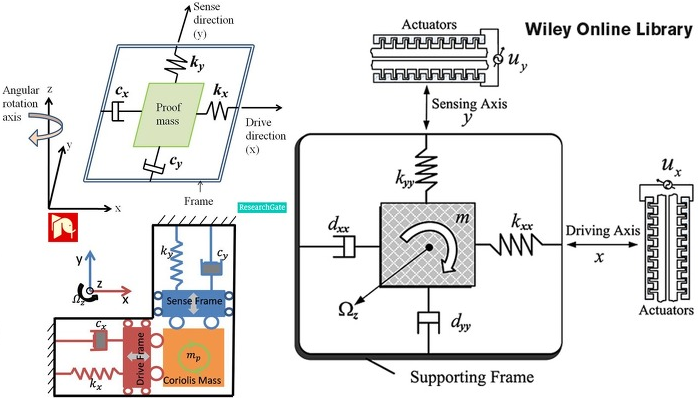
그리고, 평행판 커패시터의 이동용 전극이 움직이면 고정용 전극과 겹치는 면적, 혹은 두 전극 간의 간격이 변화하는 정도를 정전용량의 변화로 읽어, 이로부터 직선 운동 속도 v값과 코리올리 힘 F값을 얻게 되죠. 이와 같은 각속도 센서는 총 세개가 역시 3축 방향인 x-y-z 방향으로 배치됩니다. 오른손으로 주먹을 쥐고 엄지손가락을 펴서 축의 방향에 맞추면 다른 손가락들이 감긴 방향으로의 각속도값이 얻어집니다. 물론 단위는 '각도/시간, 라디안/시간'으로 표현되죠.

모바일 기기에서 각속도 센서의 주요 응용도는 물론 모션 트래킹에서 회전 속도를 측정하는 것입니다. 이에 더하여 캠코더 등으로 동영상을 촬영할 경우에 손의 떨림을 감지하여 그 값을 읽어 영상 보정을 하는 과정에서도 활용됩니다. 이 경우에 각속도 센서는 카메라 모듈 가까이에 위치하고 있죠.

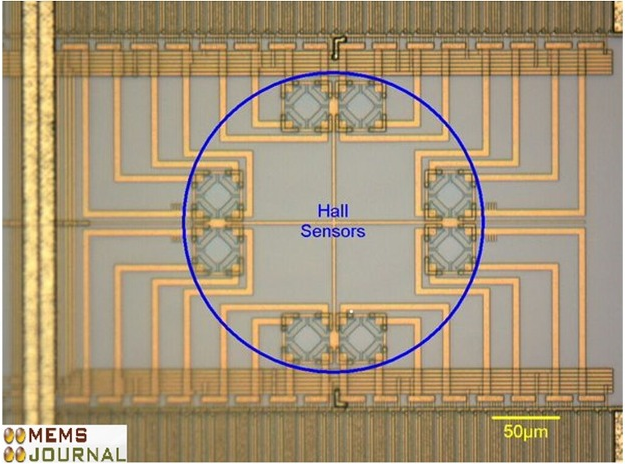
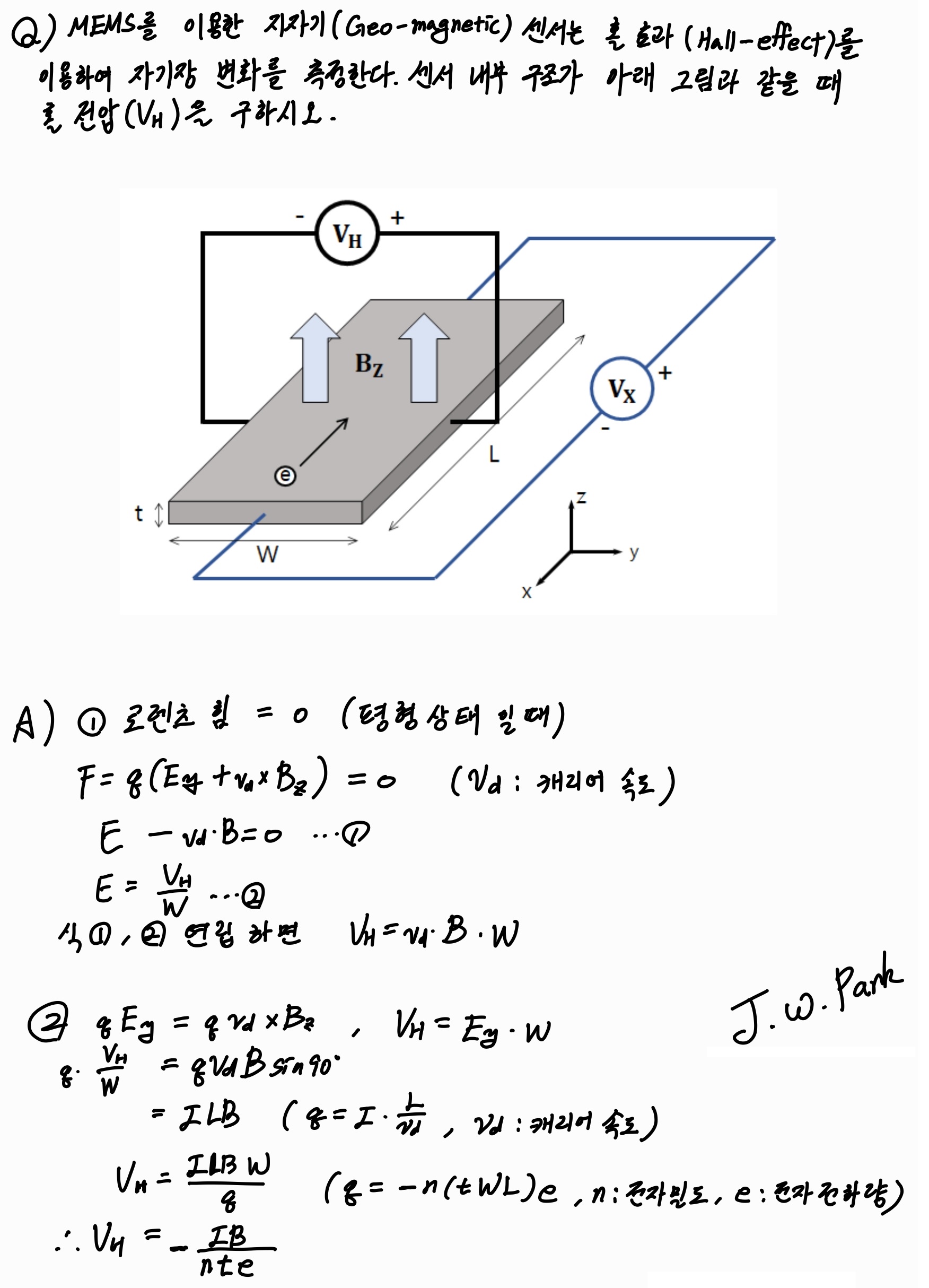
다음으로 나침반, 즉 지구 자기장을 측정하는 자기장 센서를 들 수 있습니다. 자기장 센서 기술은 매우 다양하며, 홀 효과를 이용한 소자, 자기 다이오드나 트랜지스터(magneto-diode, transistor), 비등방성 자기저항(anisotropic magnetoresistance), 거대자기저항(giant magnetoresistance), 자기 터널 접합(Magnetic Tunnel Junction, MTJ), 자기 광 센서(magneto-optical sensor), 로렌츠의 힘을 측정하는 MEMS형 센서, 전자의 터널링을 이용한 MEMS형 센서, 그리고 초전도 양자 간섭 소자(Superconducting Quantum Interference Device, SQUID) 등이 있죠.
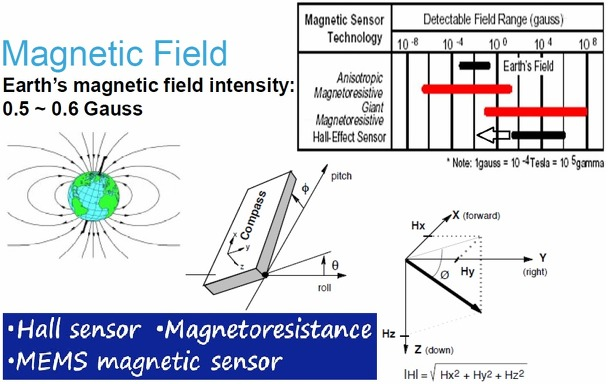
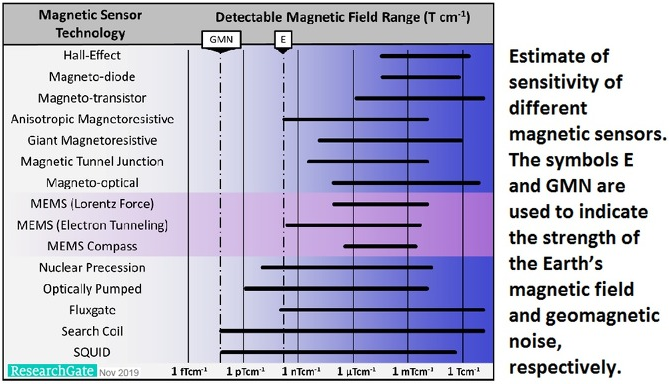
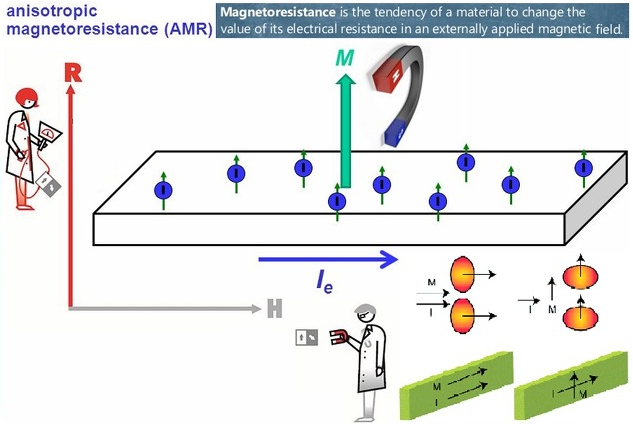
지구 자기장 범위에서 감도가 높은 자기장 센서들은 주로 자기저항효과(Magnetoresistance effect)를 이용하고 있으며, 자기장 방향이 저항 내를 흐르는 전류 방향과 일치하는 정도, 즉 자기장과 전류 방향의 각도에 따라 저항이 변화하는 비등방성 자기저항(Anisotropic MagnetoResistance, AMR) 효과가 특히 효과적으로 적용됩니다.지금까지는 주로 AMR 센서 세 개가 각각 3축 방향으로 정렬되어 벡터합으로 지구 자기장을 감지, 북극과 남극을 지정하는 나침반으로 활용되어 왔습니다.

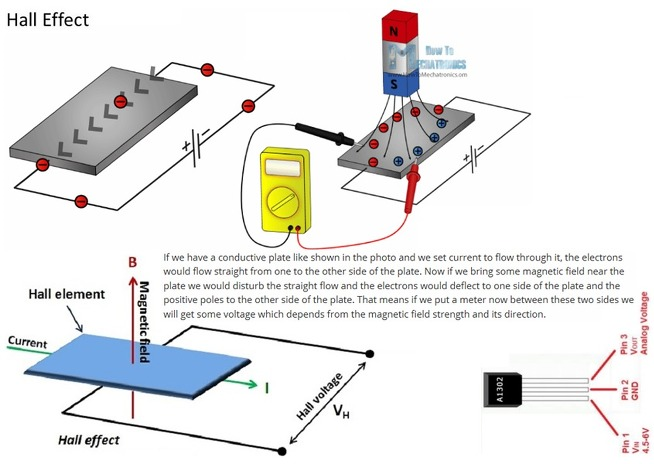
그러나 AMR과 같이 소재에 의존하는 저항 변화보다는 홀 효과에서 홀 전압이 유도되듯이 출력이 바로 전압 변화로 얻어지는 홀 센서, 혹은 로렌츠의 힘을 유도하여 MEMS 구조물의 변위를 측정하는 MEMS형 센서 등이 안정성이나 신뢰성, 그리고 내환경성 측면에서 유리하다고 판단되어 꾸준한 개발이 이루어지고 있습니다.
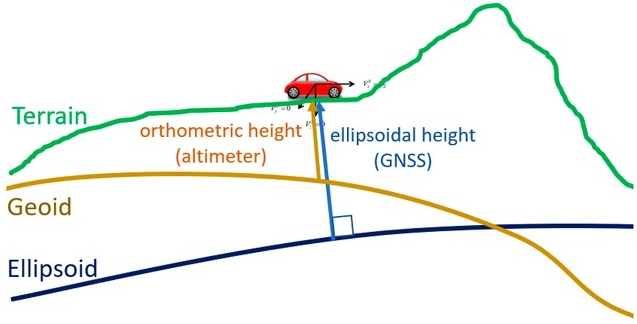
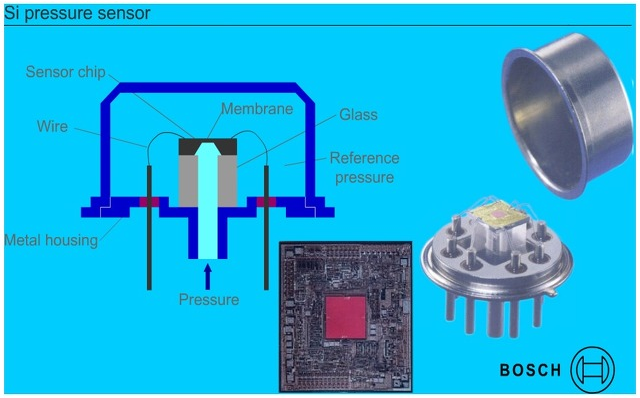
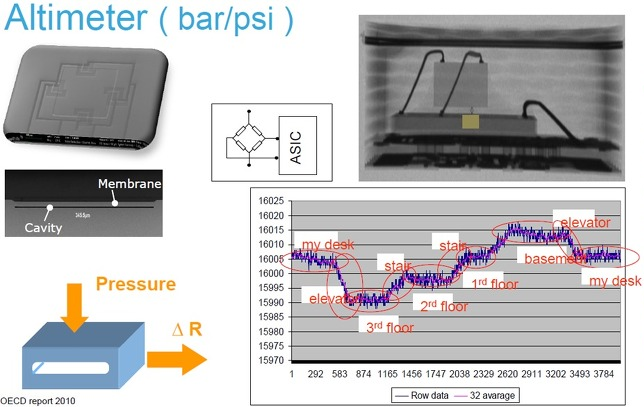
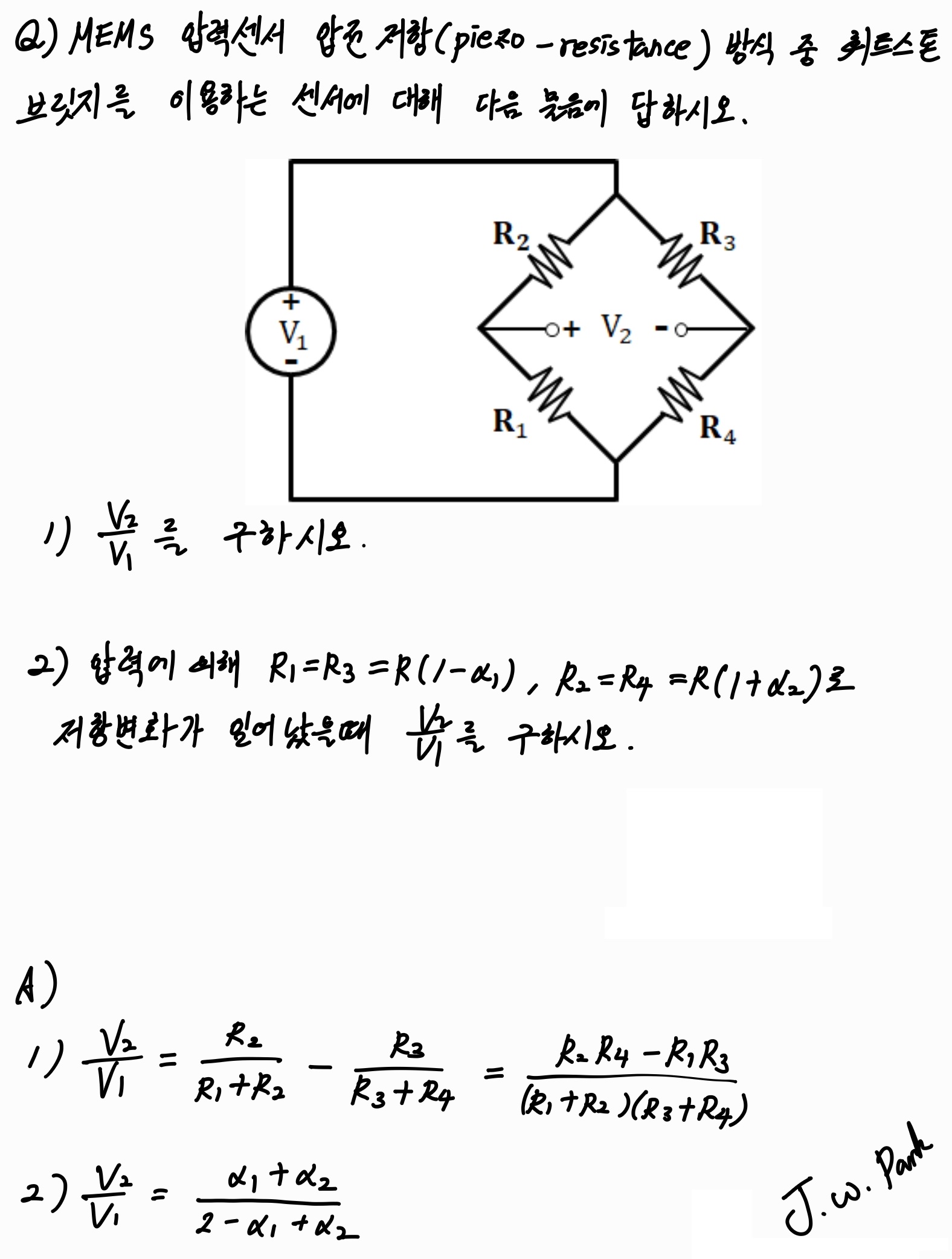
모바일 기기의 높이에 따른 위치, 즉 고도를 측정하기 위해서는 현재, 높은 감도의 실리콘 압력 센서로 높이에 따른 기압의 차이를 측정하는 방법이 주로 적용되고 있습니다. 실리콘 압력 센서는 얇은 실리콘막에 압력으로 인하여 응력이 걸리게 되면 압저항 효과(piezoresistive effect)로 막의 가장자리나 중앙에 위치한 압저항(piezoresistor)들의 저항값이 바뀌면서 인가된 압력을 측정하게 되죠. 물론 얇은 막(diaphragm, membrane)을 평행판 커패시터의 한쪽 전극으로 사용하여 압력에 따른 막의 변형으로 정전용량의 변화를 감지하는 정전용량형 압력 센서도 가능합니다. 이때 막의 두께가 얇거나 면적이 클수록 낮은 압력에도 응력이 크게 걸리거나 변형이 크게 일어나 감도가 더욱 높아집니다. 이러한 실리콘 압력 센서칩은 바로 패키지에 마운팅될 경우, 격자 상수나 열팽창 계수의 차이로 칩과 금속 패키지의 경계에서 발생한 응력이 얇은 막까지 전파되어 소자의 손상이나 성능 변화를 초래할 우려가 있죠. 이를 완화하기 위해서 센서칩과 패키지 사이에 구멍을 뚫은 유기 구조물을 정전 열 접합으로 삽입하여 버퍼 구조로 활용합니다. 실리콘 얇은 막은 두께가 20마이크론 이하로 얇아질 경우, 빛이 투과하면서 짙은 빨강색으로부터 노란색에 이르기까지 색을 띄게 되며, 이 색깔로도 막의 두께를 가늠할 수 있습니다. 막 주위의 두꺼운 영역에는 센서의 출력 신호를 증폭하고 변환할 수 있는 회로들이 집적화되는 경우도 종종 있습니다.
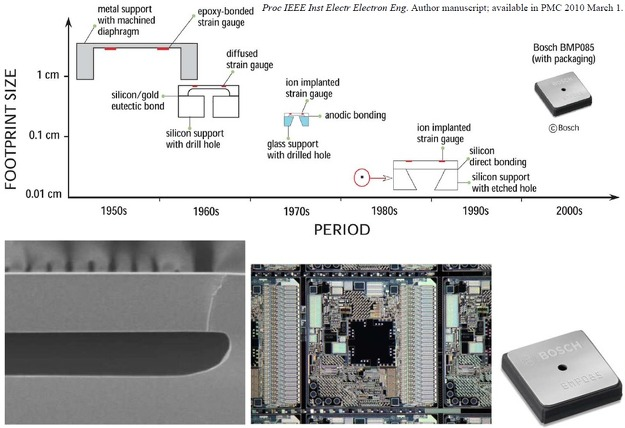
이러한 실리콘 압력 센서, 특히 압저항형 센서 기술은 초기의 금속 다이아프램을 사용한 스트레인 게이지로부터 실리콘의 몸체 미세 가공을 이용한 압력 센서, 그리고 웨이퍼 접합 후 공정을 통한 초소형 고집적 센서 등으로 발전하여 왔으며, 현재에는 1mm 이하의 칩 크기에 층간 기압까지도 용이하게 측정할 수 있는 초소형, 고성능 실리콘 압력 센서가 일반화되고 있습니다.

이러한 압력 센서를 고도계로 사용할 경우, 층간 기압차를 감지할 정도의 정밀도는 물론 시간에 따른 압력 변화의 기울기로 계단 혹은 엘리베이터의 이용 여부까지 판단할 수 있어 모션 트래킹 센서 모듈에서 고도 측정용으로 폭넓게 활용되고 있습니다. 압력 측정 방식으로는 절대압(absolute pressure), 게이지압(gauge pressure), 혹은 차압(differential) 등이 있으며, 이는 칩 내부의 기준압을 어떻게 설정하는지, 그리고 압력 인입구를 한쪽, 혹은 양쪽에 설치하는지 등으로 결정할 수 있습니다. 이러한 초소형, 고정밀 압력 센서는 모바일 기기에서 마이크로폰이나 스피커의 연계 기술로도 활용이 되며 나아가서는 자동차의 타이어 공기압 감지 시스템(Tire Pressure Monitoring System, TPMS) 등에서도 매우 중요하게 작동합니다.

# 참고로 하고 있는 여러 자료의 도움에 감사를 표하며, 계속 업그레이드 됩니다.
# 의견과 조언, 수정과 요청은 늘 환영합니다. 댓글이나 전자메일로~ bkju@korea.ac.kr
# 저작자, 본 사이트를 반드시 표시, 비영리적으로만 사용할 수 있고, 내용 변경은 금지합니다.
풀어보기

'공부와 생각들 > 전자재료 소자' 카테고리의 다른 글
| 코너 2, MEMS 이야기를 접으며 (0) | 2020.01.31 |
|---|---|
| 2-20) MEMS, 응용, 디스플레이 (2) | 2020.01.31 |
| 2-18) MEMS, 응용, 모바일 기기와 디스플레이 (5) | 2020.01.31 |
| 쉬어가기) 그들의 작품들 (0) | 2020.01.31 |
| 2-17) MEMS, 공정, 여러 기술들, LIGA (0) | 2020.01.31 |